Hệ thống servo
Hệ Thống Điều Khiển Servo (AC Servo)
Tổng quan hệ thống servo
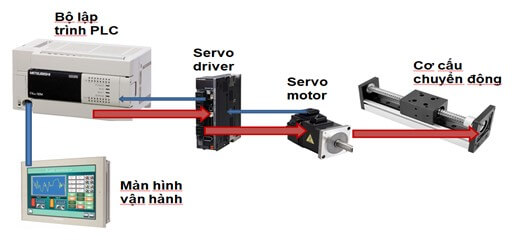
Một hệ thống Servo gồm 4 phần chính :
Bộ điều khiển lập trình PLC – Servo driver – Servo motor – Cơ cấu chuyển động
Nguyên lý cơ bản: PLC gửi lệnh điều khiển đén Driver, Driver sẽ tính toán để cấp tần số dòng điện phù hợp cho động cơ chạy, động cơ chạy truyền chuyển đồng từ đầu trục để cơ cấu chuyển động di chuyển đến vị trí yêu cầu, đồng thời động cơ phản hồi tốc độ và vị trí liên tục về cho driver so sánh với giá trị đặt, đồng thời các giá trị phản hồi về đều được gửi về PLC để giám sát và điều khiển, màn hình HMI hiển thì toàn bộ thống số
của hệ thống và cho phép vận hành bằng tay hệ thống
Phương pháp điều khiển
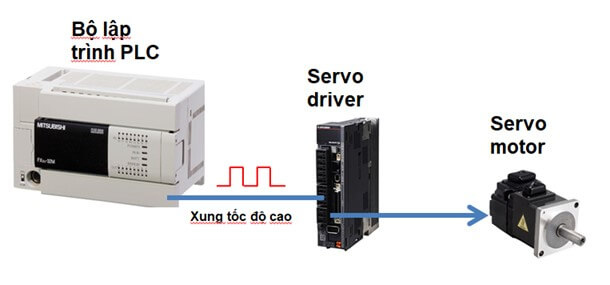
- Phương pháp điều khiển bằng xung thì PLC sẽ phát xung tốc độ cao cho servo driver và động cơ sẽ chạy đúng số xung và tần số xung do PLC phát ra. Với phương pháp này thì một PLC của hãng này có thể điều khiển cho servo của hãng khác.

- Phương pháp dùng mạng truyền thông SSCNET: ở phương pháp này các tín hiệu diều khiển từ PLC cho driver đều được thực hiện qua mạng truyền thông với module điều khiển servo. Các thống số của hệ thống đêu đều được đọc về PLC do vậy việc giám sát sẽ dễ dàng hơn
- Với phương pháp sử dụng SSCNET thì chỉ áp dụng cho PLC và servo của cùng một hãng
Nguyên lý điều khiển Servo
Nguyên lý mạch động lực
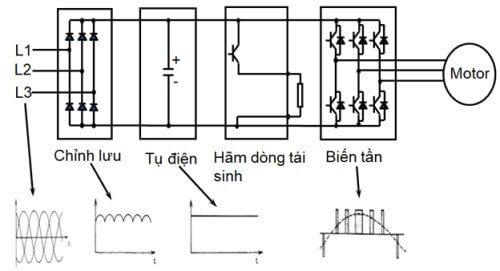
- Nguồn điện 3 pha sẽ được chỉnh lưu thành điện một chiều thông qua bộ tụ điện để chỉnh nguồn một chiều thành dạng tương đối phẳng.
- Bộ biến tần thực chất là bộ nghịch lưu chuyển đổi điện một chiều thành điện xoay chiều 3 pha, xử dụng nguyên lý điều khiển đóng ngắt các cặp van bán dẫn theo một tần số nào đó sẽ tạo ra được dòng điện xoay chiểu. Bản chất là bộ băm xung điều áp.
- Khi động cơ dừng cần có hãm thì dòng điện phát ra từ động cơ sẽ quay lại bộ điều khiển, lúc này bộ hãm tái sinh sẽ có chức năng tiêu thụ dòng hãm tái sinh đó bằng điện trở xả.
Nguyên lý điều khiển
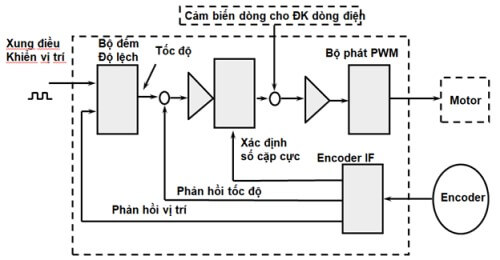
- Khi nhận được xung điều khiển, bộ điều khiển sẽ tính toán để phá xung PMW cho động cơ chạy, trong quá trình chạy vị trí và tốc độ luôn được phản hồi về bộ điều khiển thông qua encoder
- Bộ điều khiển dựa vào các tín hiệu gửi về và so sánh tính toán ra độ lệch và tiếp tục điều chỉnh xung xuất ra giúp động cơ đạt được vị trí mong muốn với tốc độ đặt
- Cảm biến dòng luôn phản hồi dòng điện tiêu thụ trên động cơ, thực chất là tải thực tế, từ đó có thể tính toán được tải thực tế và hiệu chỉnh dòng ra cho phù hợp với giá trị đặt
Các loại cáp trong hệ thống Servo
